Yaskawa Absolute Encoders with Apollo III
Yaskawa Absolute Encoder feature allows the Apollo III to read the encoder position without the need for homing. When the CNC control software starts the software will read the encoder positions from the servo drives and update the internal positions from 0 to the actual motor positions.
Requirements:
- Apollo III Absolute Encoder license
- Buffer board part number X15-03-04 and version V1.02 or greater
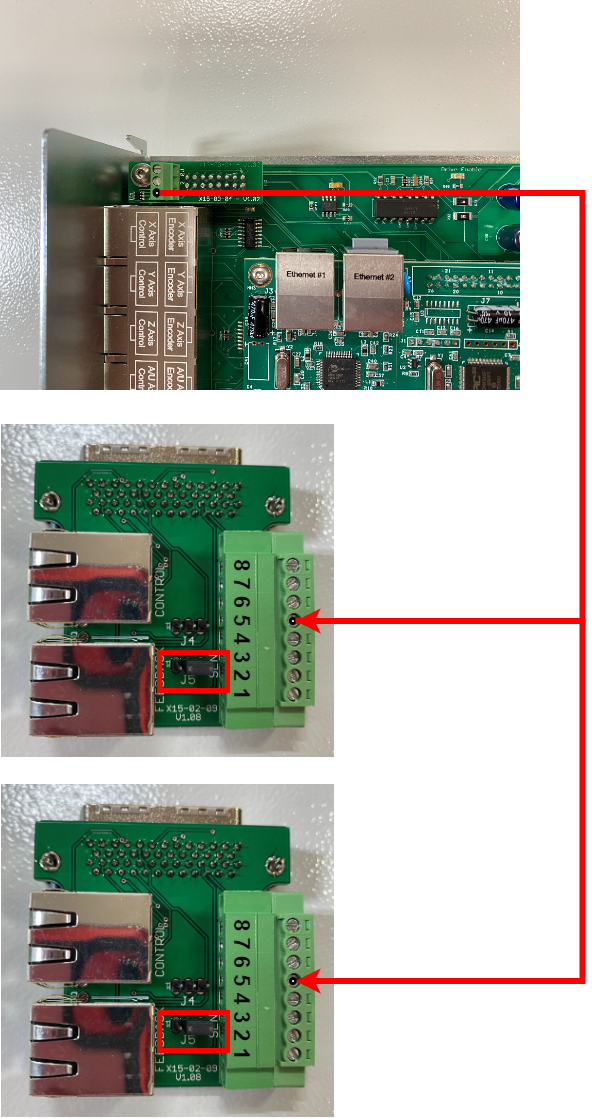
- Digital Servo Adaptor board part number X15-02-09 and version 1.08 or greater
- Jumper installed on J5 and in the 2, and 3 position
- Motor Encoder cable with batter or battery adaptor JZSP-CSP12-E
- Standoff MPN number Hex6.35x17.46 and MM number 100536
Components:
Absolute Encoder License
Use the VSI Device Manager to confirm the Absolute Encoders feature is active

Buffer board X15-03-04
This board is used to send the SEN command to the Yaskawa servo drive through the Servo Adaptor Board. The board needs to be installed onto the Apollo III and a wire ran from the terminal labeled "1" on the green block to J1 pin "5" of the Servo Adaptor Board.

Digital Servo Adaptor board X15-02-09
This board is used to connect the Yaskawa drive to the Apollo III for commands and feedback. Confirm the version number on the board is at least V1.08 or it will not work with the Absolute Encoder interface.

Motor Encoder Cable with Battery JZSP-CSP12-E
Yaskawa servo motors need a battery on the encoder cable to use the Absolute Encoder feature. A new encoder cable can be purchased with the battery installed or a adaptor can be used like the one in the following photo.

Installation
Hardware Kit
- Buffer board
DigitalDigital Servo Adaptor- Motor Encoder cable
- Standoff MPN number Hex6.35x17.46 and MM number 100536
Remove cover

Remove mounting screw

Install Standoff

Install Buffer Board

Reinstall mounting screw

Install jumper on servo adaptor J5 pin 2-3 next to the labeled SEN

Install wire from Buffer Board to all Yaskawa servo adaptors for SEN signal

Install Motor Encoder Cable with Battery
Software and Parameters Setup