CTB GH Series Servo Spindle Setup
![]()
1. Introduction
1.1 Spindle Drive Options
The CTB drives can be configured to use the encoder on that is built into the motor or a external load encoder for position feedback. The encoder on the motor should always be connected to the drive with connector T5.
1.2 External Load Encoder
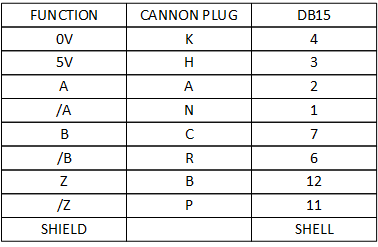
The external encoder must be a 5V TTL quadrature encoder with A,B and marker pulse to be used for orientation of the spindle. It is very important that the external encoder is mounted 1:1 ratio to the spindle load.
Encoder wiring
This manual gives the process for basic operation of a using the MachMotion control. The screen is shown below, followed by a brief summary of the different features of the screen. The number shown in the screenshot refers to a brief description below the image.